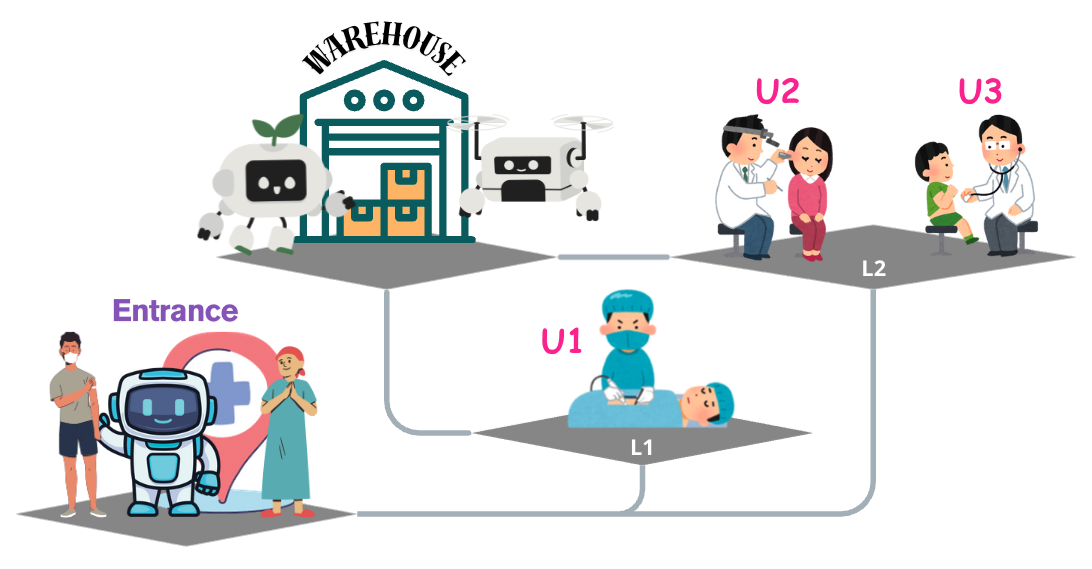
Healthcare logistics in modern hospitals requires precise coordination of autonomous systems for efficient patient care and resource management. This project tackles the complexity of multi-agent robotic coordination in healthcare environments, where specialized robots must deliver medical supplies to patients while managing transportation logistics under realistic constraints.
Our comprehensive study demonstrates the evolution from classical STRIPS-based planning to sophisticated real-world implementations, providing insights into planning methodology trade-offs, scalability considerations, and practical deployment challenges through a distributed ROS2 architecture.
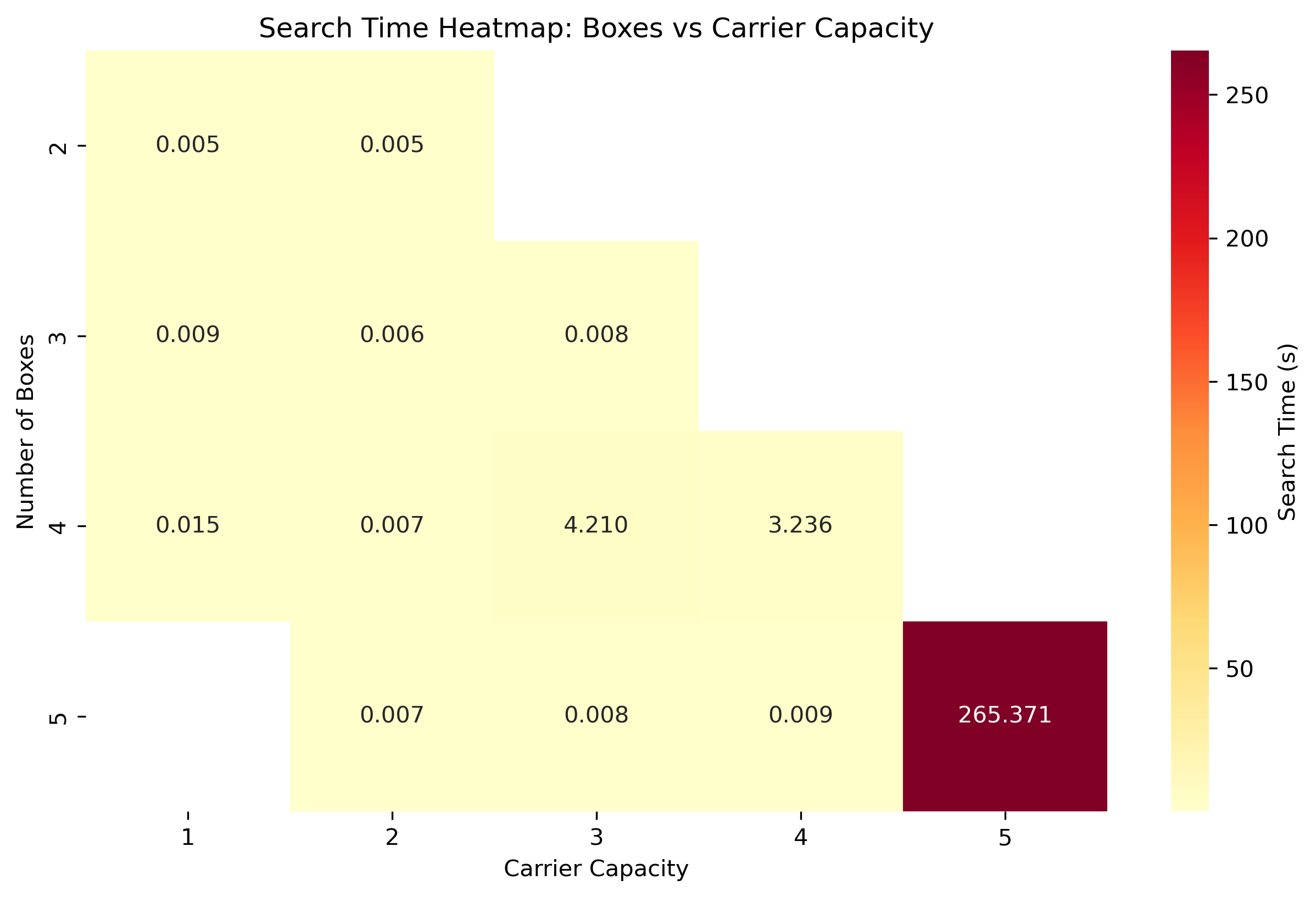
Our healthcare logistics domain encompasses five distinct problem variants, each building upon the previous to demonstrate the evolution of planning complexity:
Our multi-paradigm approach leverages different planning technologies:
Real-world distributed planning system demonstration using ROS2 and PlanSys2 framework
Our realistic healthcare scenario includes:
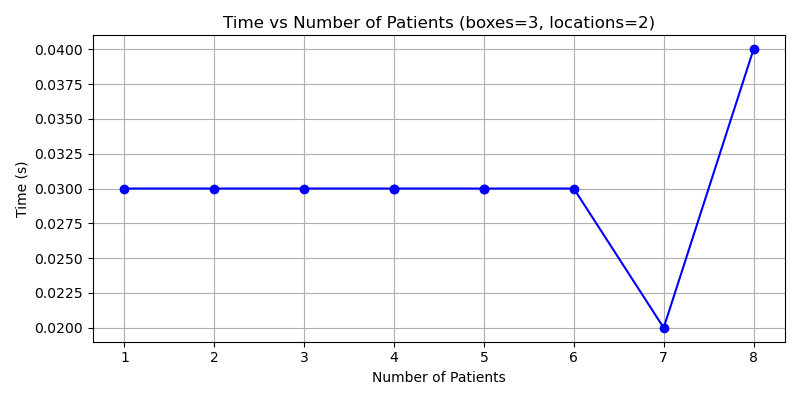
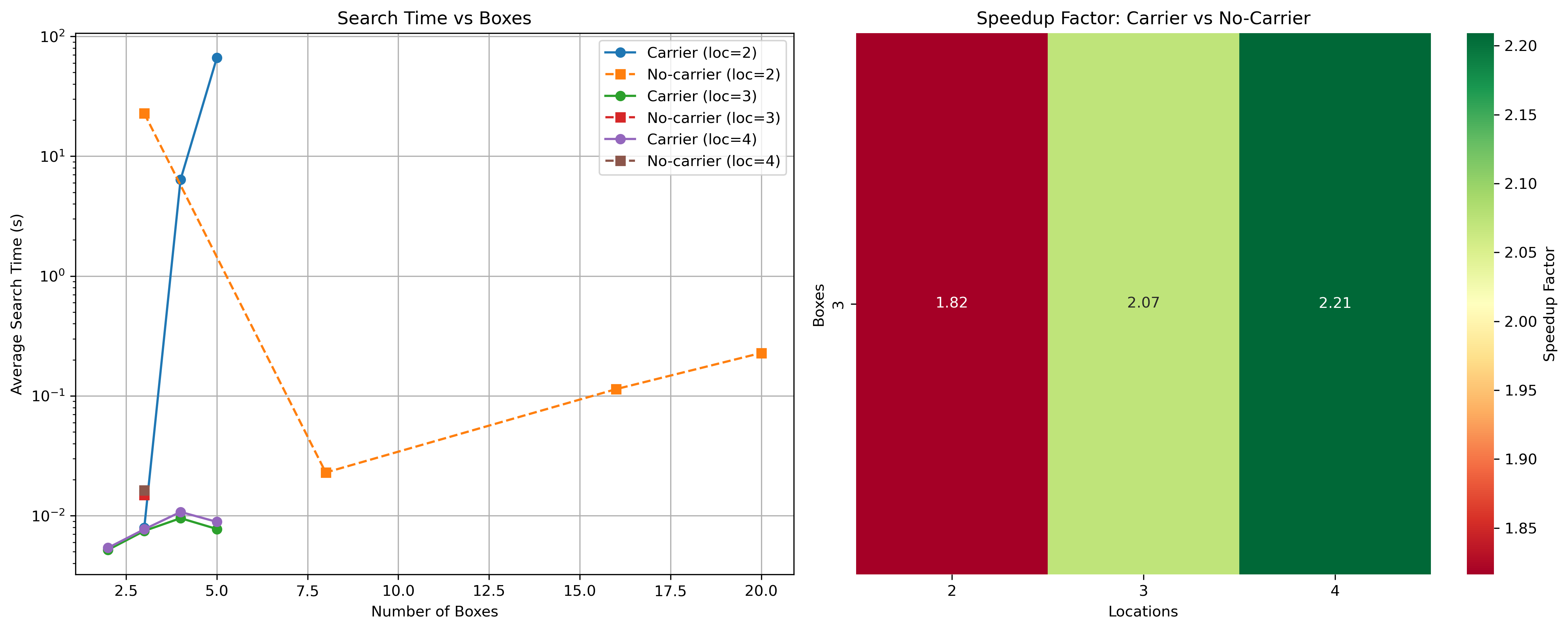
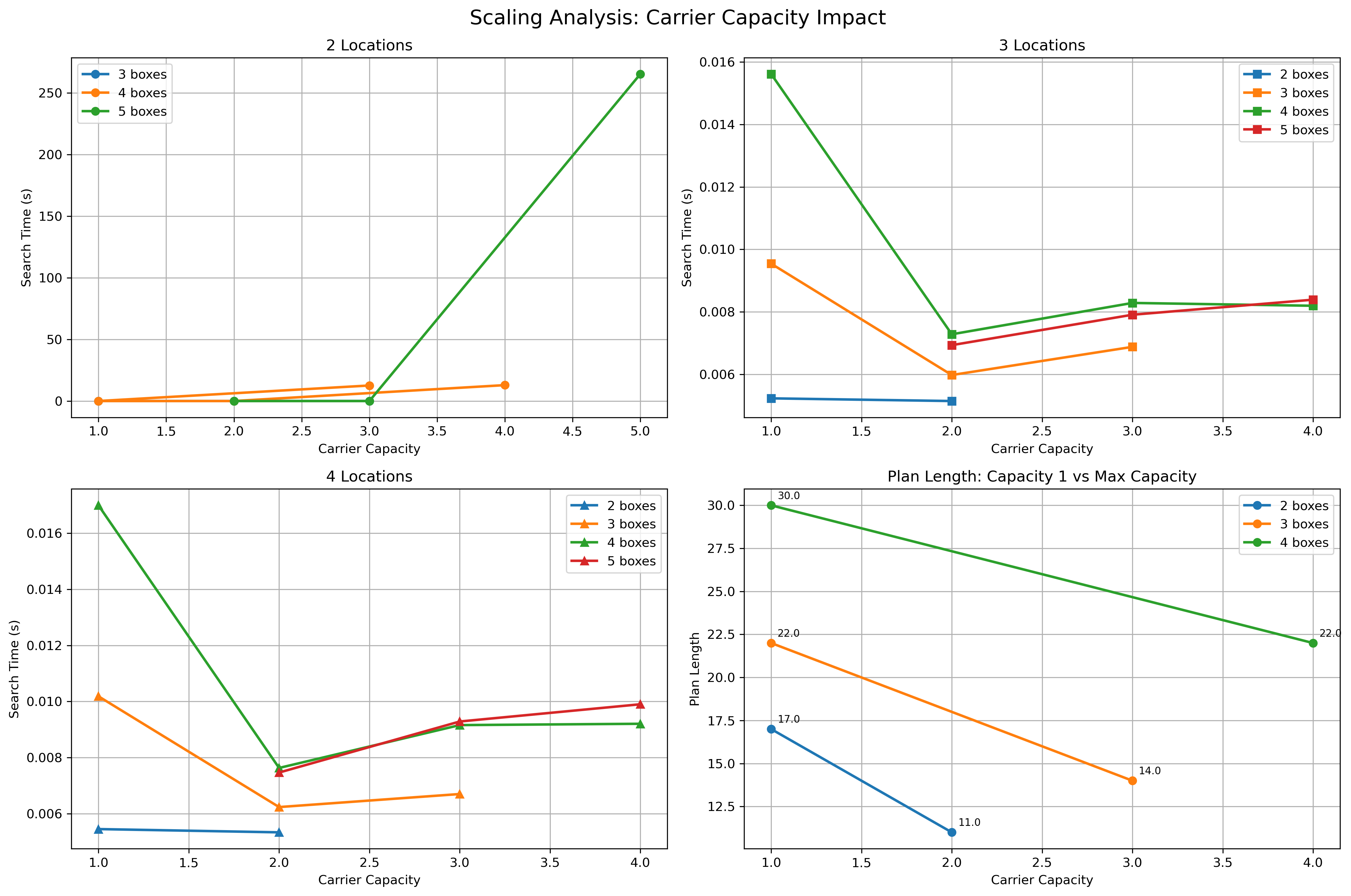
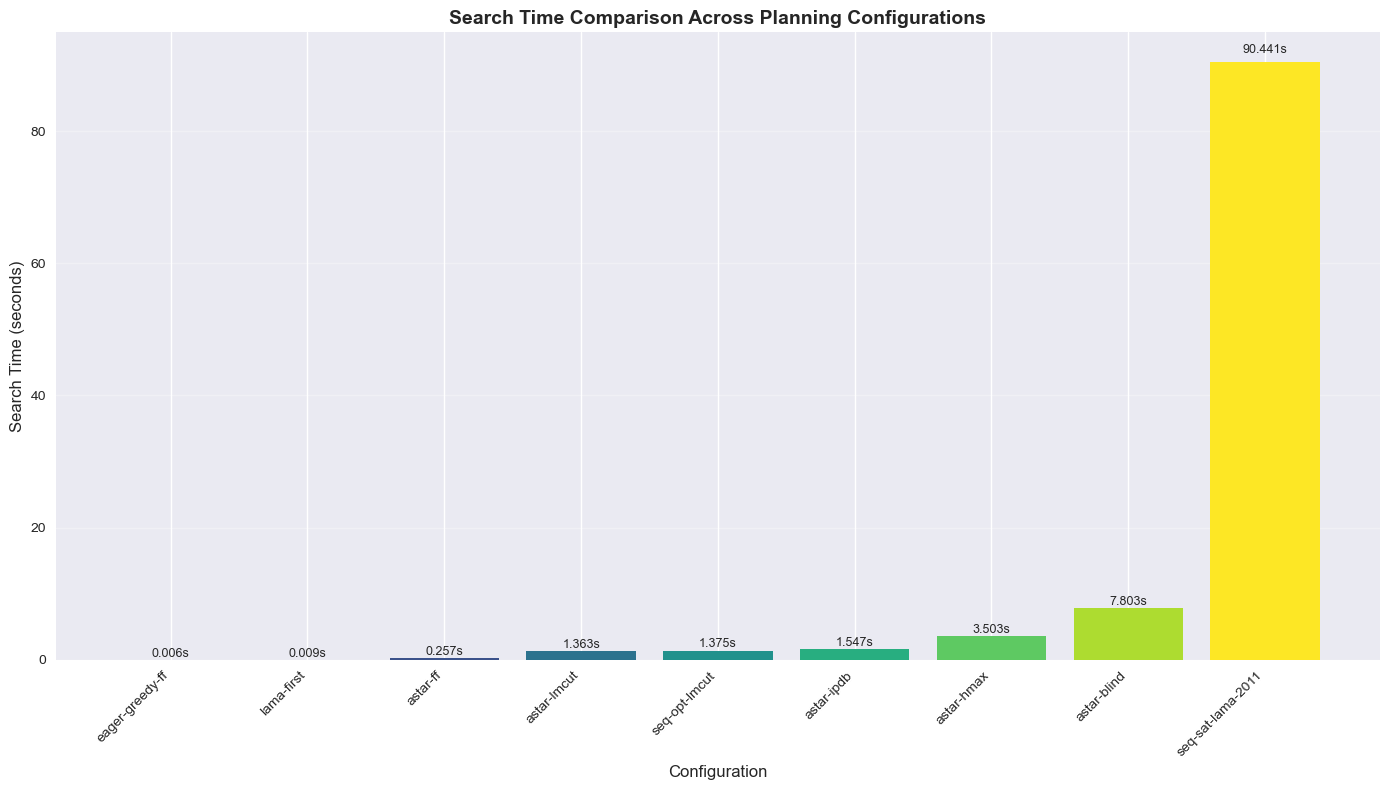
Our comprehensive evaluation demonstrates significant insights across all planning paradigms:
This work demonstrates practical applications for:
Our study provides:
@misc{decarlo2025planning,
title={Automated Planning for Healthcare Logistics: From Classical to Real-World Implementation},
author={De Carlo, Andrea},
year={2025},
institution={University of Trento},
type={Course Project},
note={Automated Planning and Temporal Planning}
}